CV / ORCID / Google Scholar
I am an Associate Professor in the Department of Computer Science and Engineering at the University of Texas at Arlington. I'm also the founder and director of the Robotic Vision Laboratory. My research focuses on robot perception, learning, and autonomy. Concretely, my goal is to create intelligent robotic systems that can sense, plan, and act in complex environments while continuously improving over time.
Prospective students: If you are a current student at UT Arlington, then please fill out this form. Otherwise, please apply directly to the PhD program and mention my name in your application. I am actively recruiting undergraduate/graduate students, who are U.S. citizens, to work on DoD and USDA projects.
Email: william.beksi at uta.edu
Office: Engineering Research Building 523, 500 UTA Blvd, Arlington, TX 76019
News
- My PhD student Zongyao Lyu received the UTA Dissertation Fellowship
- I received a grant from Cotton Incorporated to continue developing machine vision tools for high-throughput cotton phenotyping
- I will be a keynote speaker at the Texas Regional Robotics Symposium (TEROS) 2026
- I'll serve as an Associate Editor for IROS 2026
- I was invited to speak at the 2nd Workshop on Event-Based Vision in the Era of Generative AI at WACV 2026
- I was invited to give a technical talk on our event-based vision research to NSWC PCD
- I received a USDA grant to develop a computer vision system for classifying pecan foliar diseases
- I will serve as an Associate Editor for ICRA 2026
- I was awarded an ONR grant to explore event-based sensing for underwater environmental monitoring
- I have been elevated to an IEEE Senior Member
- I was awarded an AFOSR grant to create noise modeling techniques for event-based sensors
- My PhD students Pritam Karmokar and Md Ahmed Al Muzaddid received the UTA Dissertation Fellowship
- My PhD student Joe Cloud received the UTA CSE Outstanding Doctoral Dissertation Award
- My PhD student Jordan James received the UTA CSE John S. Schuchman Outstanding Doctoral Student Award
- I was awarded a NEEC grant from NSWCDD to investigate mitigating data distribution shifts in machine learning systems
- I was invited to chair the "Space Robotics 1" session at ICRA 2025
- I received a grant from Cotton Incorporated to develop machine vision tools for high-throughput cotton phenotyping
- I'll serve as an Associate Editor for IROS 2025
- I was invited to give a technical talk on our event-based vision research to NSWCDD
- I received the 2024 Rising Star Research Award from the UTA CSE department
- I was awarded a USDA grant to develop a deep learning framework for in-ground root segmentation
- I'll serve as an Associate Editor for ICRA 2025
- My PhD student Minh (Jerry) Tram received the UTA CSE John S. Schuchman Outstanding Doctoral Student Award
- My PhD student Nolan Gutierrez was awarded a DoD SMART scholarship
- I will be a 2024 ONR Summer Faculty Fellow at NSWCDD
- Our AFRL-sponsored 3D computer vision project was featured as a UTA news release
- I'll serve as an Associate Editor for IROS 2024
- I will serve as a Guest Editor for a Drones special issue on Artificial Intelligence and Machine Learning in UAV Technology
- I presented my lab's latest work to the AFRL Materials and Manufacturing Directorate
- I'll serve as an Associate Editor for IEEE Transactions on Automation Science and Engineering
- I will serve as an Associate Editor for UR 2024
- I received a USDA grant to create computer vision tools for automating high-throughput crop phenotyping
- In collaboration with krtkl, I've been awarded a Phase II contract by AFRL to develop a 3D vision system for advanced manufacturing
- I'll serve as an Associate Editor for ICRA 2024
- Dongchul Kim and I were awarded a grant from Google to explore causal reinforcement learning
- I will be a 2023 ONR Summer Faculty Fellow at NSWCDD
- Nick Gans, Katie Skinner, and I will be organizing the first workshop on Photorealistic Image and Environment Synthesis for Robotics at IROS 2023
- My PhD student Minh (Jerry) Tram was awarded a DoD SMART scholarship
- I will serve on the Program Committee of ICVS 2023
- I'll serve as an Associate Editor for IROS 2023
- I will serve as an Associate Editor for UR 2023
- I was invited to give a talk at the First Workshop on Photorealistic Image and Environment Synthesis for Computer Vision at WACV 2023
- I will be working with krtkl to create a neuromorphic stereo vision system (Phase 1) for the U.S. Space Force as part of the Orbital Prime program
- I will be a 2022 ONR Summer Faculty Fellow at NSWCDD
- I was invited to chair the "RGB-D Perception I" session at ICRA 2022
- I received a generous donation of tools from Stanley Black & Decker
- I will serve as an Associate Editor for UR 2022
- In collaboration with krtkl, I've been awarded a Phase I contract by AFRL to develop a 3D vision system for advanced manufacturing
- I've joined the Standard for Measuring Robot Agility (IEEE P2940) working group
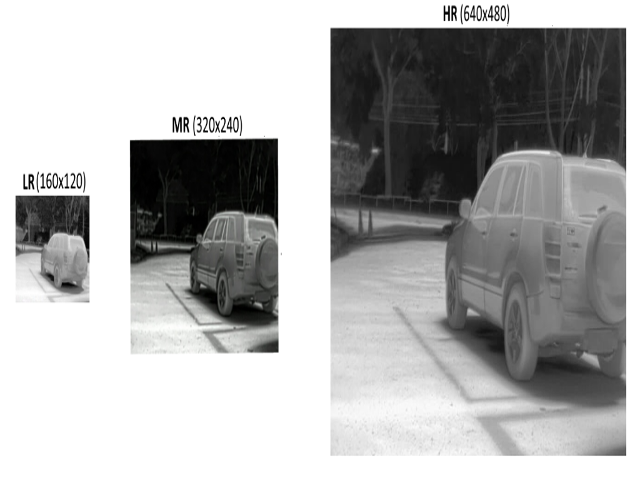
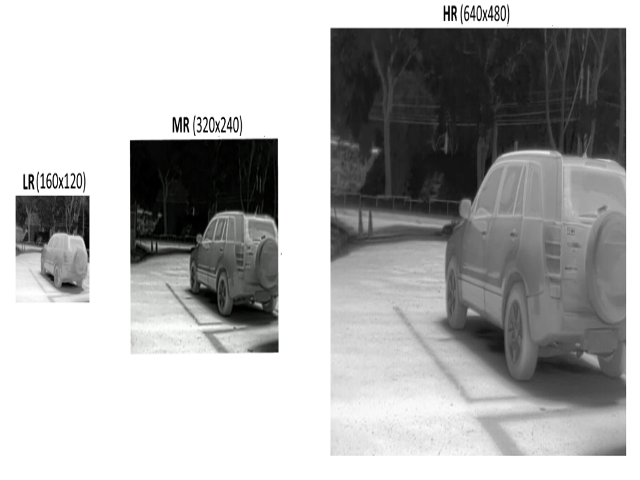
- Our work on thermal image super-resolution was an ICVS 2021 Best Conference Paper Award finalist
- Our work on probabilistic movement primitive control by control barrier functions was a CASE 2021 Best Conference Paper Award finalist
- I received a set of Jetson Nano 2GB Developer Kits through the NVIDIA Grant Program
- I was invited to chair the session "Stereo Vision Applications" at ICRA 2021
- I'll serve as an Associate Editor for UR 2021
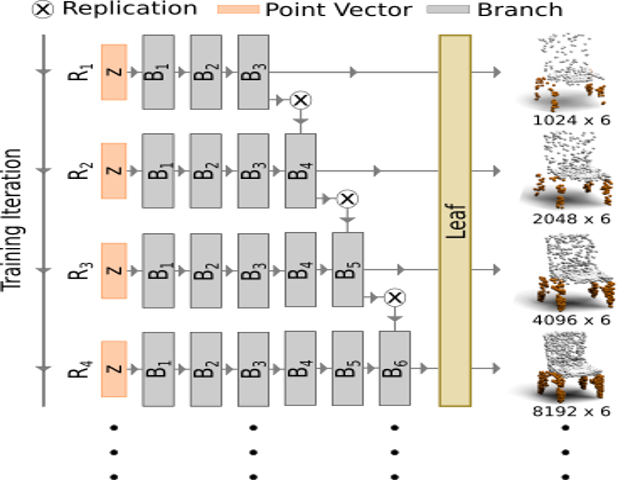
- Our work on generating dense and colored 3D point cloud objects was featured as a TACC-enabled science story
- I will be a Faculty Chair for the IROS 2020 tutorial Space Robotics for In-Situ Resource Utilization: Needs, Challenges, and Approaches
- I've been awarded an NSF REU Supplement
- Animesh Chakravarthy and I received a UTA Research Enhancement Program grant to explore vision-based collision avoidance for UAVs
- I received an NSF CRII Award to investigate topological methods for robotic perception
- I will serve as an Associate Editor for UR 2020
Publications
C. Sen Mukherjee, S-C Yoon, and W.J. Beksi
IEEE International Conference on Automation Science and Engineering (CASE), 2026
Paper •
Preprint •
Website •
Citation

Z. Lyu and W.J. Beksi
International Conference on Pattern Recognition (ICPR), 2026
Paper •
Supplement •
Preprint •
Source Code •
Citation

M.A.A Muzaddid and W.J. Beksi
International Conference on Pattern Recognition (ICPR), 2026
Paper •
Supplement •
Preprint •
Source Code •
Citation
M.A.A Muzaddid and W.J. Beksi
IEEE International Conference on Robotics and Automation (ICRA), 2026
Paper •
Preprint •
Website •
Citation
N. Truong, P.P. Karmokar, and W.J. Beksi
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) Workshops, 2026
Best Paper Award •
Paper •
Preprint •
Website •
Citation
N.B. Gutierrez, B.M. Sadler, and W.J. Beksi
Engineering Applications of Artificial Intelligence, 2025
Paper •
Source Code •
Citation

J.M. Cloud, W.J. Beksi, and J.M. Schuler
IEEE International Conference on Robotics and Automation (ICRA), 2025
Paper •
Citation
J.M. Cloud, B.C. Buckles, T.J. Muller, W.J. Beksi, and J.M. Schuler
IEEE International Conference on Robotics and Automation (ICRA), 2025
Paper •
Citation
P.P. Karmokar, Q.H. Nguyen, and W.J. Beksi
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2025
Paper •
Supplement •
Preprint •
Source Code •
Citation
Z. Lyu and W.J. Beksi
International Conference on Pattern Recognition (ICPR), 2024
Paper •
Supplement •
Preprint •
Source Code •
Citation

J.A. James, H.K. Manching, M.R. Mattia, K.D. Bowman, A.M. Hulse-Kemp, and W.J. Beksi
IEEE Robotics and Automation Letters, 2024
Paper •
Preprint •
Website •
Citation

J.A. James, H.K. Manching, A.M. Hulse-Kemp, and W.J. Beksi
IEEE International Conference on Robotics and Automation (ICRA), 2024
Paper •
Preprint •
Source Code •
Citation

M.A.A Muzaddid and W.J. Beksi
IEEE Transactions on Automation Science and Engineering, 2024
Paper •
Preprint •
Website •
Citation

M.S. Arshad and W.J. Beksi
IEEE/CVF International Conference on Computer Vision (ICCV), 2023
Paper •
Supplement •
Preprint •
Source Code •
Citation
M.S. Arshad and W.J. Beksi
Journal of Visual Communication and Image Representation, 2023
Paper •
Preprint •
Source Code •
Citation
J.M. Cloud, M.Q. Tram, W.J. Beksi, and M.A. DuPuis
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Paper •
Preprint •
Citation
M.Q. Tram, J.M. Cloud, and W.J. Beksi
IEEE International Conference on Robotics and Automation (ICRA), 2023
Paper •
Preprint •
Source Code •
Citation
Z. Lyu, N.B. Gutierrez, and W.J. Beksi
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) Workshops, 2023
Paper •
Supplement •
Preprint •
Citation
Q.H. Nguyen and W.J. Beksi
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2023
Paper •
Supplement •
Preprint •
Source Code •
Citation
M. Davoodi, A. Iqbal, J.M. Cloud, W.J. Beksi, and N.R. Gans
IEEE Transactions on Automation Science and Engineering, 2023
Paper •
Citation
M.S. Arshad and W.J. Beksi
IEEE International Symposium on Mixed and Augmented Reality (ISMAR) Workshops, 2022
Paper •
Preprint •
Citation
K. Dhal, P. Karmokar, A. Chakravarthy, and W.J. Beksi
Journal of Intelligent & Robotic Systems, 2022
Paper •
Source Code •
Citation
M. Davoodi, A. Iqbal, J.M. Cloud, W.J. Beksi, and N.R. Gans
Frontiers in Robotics and AI, 2022
Paper •
Citation
M.A.A Muzaddid and W.J. Beksi
IEEE International Conference on Robotics and Automation (ICRA), 2022
Paper •
Preprint •
Source Code •
Citation
N.B. Gutierrez and W.J. Beksi
International Conference on Computer Vision Systems (ICVS), 2021
Best Conference Paper Award Finalist •
Paper •
Preprint •
Source Code •
Citation
M. Davoodi, J.M. Cloud, A. Iqbal, W.J. Beksi, and N.R. Gans
Modeling, Estimation, and Control Conference (MECC), 2021
Paper •
Citation
Z. Lyu, N.B. Gutierrez, and W.J. Beksi
IEEE International Conference on Automation Science and Engineering (CASE), 2021
Paper •
Preprint •
Source Code •
Citation
M. Davoodi, A. Iqbal, J.M. Cloud, W.J. Beksi, and N.R. Gans
IEEE International Conference on Automation Science and Engineering (CASE), 2021
Best Conference Paper Award Finalist •
Paper •
Citation
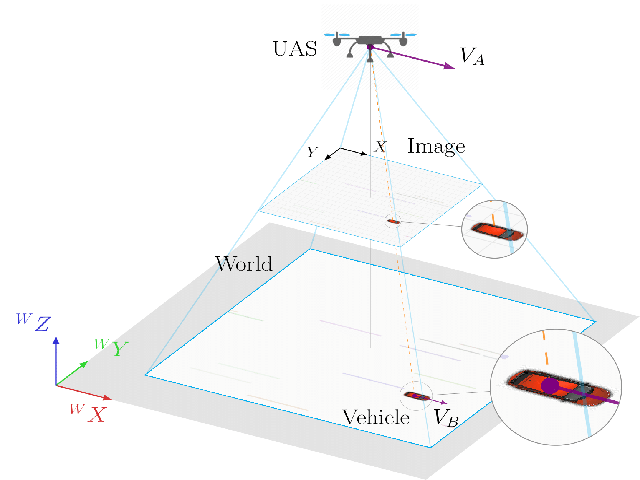
P. Karmokar, K. Dhal, W.J. Beksi, and A. Chakravarthy
International Conference on Unmanned Aircraft Systems (ICUAS), 2021
Paper •
Preprint •
Source Code
•
Citation
R.E. Rivadeneira, A.D. Sappa, B.X. Vintimilla, S. Nathan,
P. Kansal, A. Mehri, P.B. Ardakani, A. Dalal, A. Akula, D. Sharma, S. Pandey, B. Kumar, J. Yao, R. Wu, K. Feng, N. Li, Y. Zhao, H. Patel, V. Chudasama, K. Prajapati, A. Sarvaiya, K.P. Upla, K. Raja, R. Ramachandra, C. Busch, F. Almasri, T. Vandamme, O. Debeir, N.B. Gutierrez, Q.H. Nguyen, and W.J. Beksi
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2021
Paper •
Citation •
Webpage
C. Collander, W.J. Beksi, and M. Huber
IEEE International Conference on Robotics and Automation (ICRA), 2021
Paper •
Preprint •
Source Code •
Citation
M.S. Arshad and W.J. Beksi
International Conference on 3D Vision (3DV), 2020
Paper •
Preprint •
Source Code •
Citation
Z. Lyu, N. Gutierrez, A. Rajguru, and W.J. Beksi
European Conference on Computer Vision (ECCV) Workshops, 2020
Paper •
Preprint •
Citation •
Webpage
R.E. Rivadeneira, A.D. Sappa, B.X. Vintimilla, L. Guo, J. Hou, A. Merhi, P. Behjati, A.H. Patel, V. Chudasama, K. Prajapati, K.P. Upla, R. Ramachandra, K. Raja, C. Busch, F. Almasri, O. Debeir, S. Nathan, P. Kansal, N. Gutierrez, B. Mojra, and W.J. Beksi
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2020
Paper •
Citation •
Webpage


Teaching
- Robotics (CSE 4360/5364), Fall 2025
- Robotic Vision (CSE 5369), Fall 2024
- Artificial Intelligence I (CSE 4308/5360), Fall 2023
- Artificial Intelligence I (CSE 4308/5360), Fall 2022
- Computer Vision (CSE 6367), Spring 2022
- Artificial Intelligence I (CSE 4308/5360), Fall 2021
- Computer Vision (CSE 6367), Spring 2021
- Artificial Intelligence I (CSE 4308/5360), Fall 2020
- Computer Vision (CSE 6367), Spring 2020
- Artificial Intelligence I (CSE 4308/5360), Fall 2019
- Computer Vision (CSE 6367), Spring 2019
- Artificial Intelligence I (CSE 4308/5360), Fall 2018
Sponsors